Atlas 是由美国波士顿动力公司开发和研制的一款人型机器人,应该也是当前全球范围内最为成熟的人型机器人。
本文翻译自:blog.bostondynamics.com/flipping-the-script-with-atlas
(原始版权归波士顿动力所有)
认知能力和适应力使得Altas能够执行多种多样,高力量的行为,就像跑酷人员一样。

机器人需要具备什么条件才能像运动员那样,跑,翻转,跳跃,飞奔? 创造这些高能的演示是一个有趣的挑战,但是我们的技术目标已经超越了仅仅去创建一个浮夸的表演。在Atlas项目上,我们采用跑酷作为一个实验性的题目,去研究与快速行为创造,动态移动,以及认知能力与控制力之间的联系相关的问题,这些问题(的解决)能够让机器人适应 - 真正地 - 在空中飞行(健步如飞)。
感知跑酷
机器人感知算法常用于把来自摄像头和激光雷达等传感器中的数据转换成有用的东西,用来做决策和规划身体行为。当Atlas使用 IMUs 的时候,联合姿势,以及强迫传感器去控制它的身体移动和感知地面以达到身体平衡,这要求认知能力能够识别和绕过如裂缝,狭窄的横梁这样此类的障碍物,见图1:
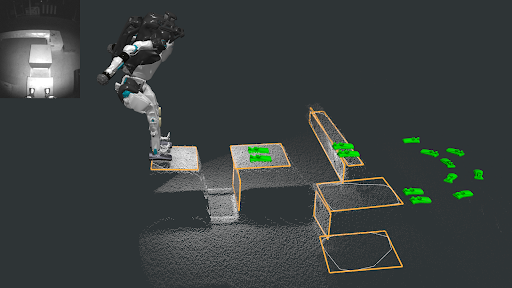
为了去执行一条延长的跑酷路线,我们给予机器人一个高级别的地图,地图包括我们想让它去哪里以及沿着这条路应该做什么特技表演。这个地图与真实的跑酷路线在几何上并不精确匹配;它是一个大致的描述,包含着障碍物模板和被注解的动作。Atlas使用稀少的信息去确定跑酷路线,但是使用实时的感知数据去填充路线细节。例如,Atlas知道去寻找一个箱子并跳上去,假如箱子向一侧移动0.5米,这时Atlas 会在那里找到它并跳到那里。如果箱子被移动的太远,此时系统未能发现它,系统会停下来。
行为库
你所看见的Atlas在跑酷中执行的每一个动作,都来自于一个使用轨迹优化事先创建的范例(样板)。创建这些范例库,允许我们通过添加新的轨迹路线到库中,这样就可以给机器人增加新的能力。给定从感知中获得的路线目标,机器人从库中选择与给定目标尽可能匹配的行为。
通过轨迹优化,离线设计行为,使得我们的工程师可以提前以交互的方式研究机器人的能力限制。例如,由于身体,驱动的限制,机器人如何精确地协调其四肢,启动和收起以完成一个后空翻的动作细节,对于成功有重大的影响。离线优化的优势允许我们在设计时捕获这样的重要限制,并且使用单个通用控制器在线调整它们。
模型-预测控制
在规划了一系列动作以越过机器人前面的箱子、坡道或障碍物后,剩下的挑战便是填充机器人执行路径规划所需的所有细节。
Atlas 的控制器是所谓的模型预测控制器 (MPC),因为它使用机器人动力学模型来预测其运动将如何演变为未来的动作。控制器通过求取最优解来计算现在要做的最佳事情,以随着时间的推移产生最佳可能的运动。
正如我们上面所描述的,我们行为库中的每个模板都为控制器提供了一个好的解决方案是什么样子的信息。控制器会调整力量、姿势和分时行为等细节,以应对几何环境、脚滑或其他实时因素的差异。拥有能够显著偏离模板运动的控制器可以简化行为创建过程,因为这意味着我们不必拥有与机器人将遇到的每种可能场景相匹配的行为模板。例如,从 52 厘米的平台上跳下与 40 厘米的跳台没有什么不同,我们可以信任 MPC 来解决细节问题。
为未来奠定基础
我们在跑酷方面的工作让我们对如何在 Atlas 上创建和控制广泛的动态行为(也包括舞蹈)有了深刻的了解。 但更重要的是,它创造了设计可扩展软件系统的机会,随着 Atlas 获得感知和改变其环境的新能力,该系统将与我们的团队一起成长。 随着我们拓宽了 Atlas 的能力范围,我们很高兴继续在此基础上打造Atlas。
(本文是我第一次尝试翻译 Atlas 机器人相关的文章,感觉还有很多不足,当作为参考文献时,请考虑到这些问题)